AI Car Damage Detection: Methodology, Models, and How It Works
Explore how AI is changing vehicle inspections and car damage detection across insurance, car rental/remarketing, and fleet management industries by enhancing damage detection accuracy and efficiency.

Manual vehicle damage assessment is slow, subjective, and does not scale. A human inspector examining a car can take 30 to 45 minutes per vehicle, produce inconsistent findings, and miss micro-level damage entirely. For insurers, rental companies, and fleet operators processing thousands of vehicles, this creates measurable cost and liability exposure.
Inspektlabs' model is trained on over 10 million labelled vehicle damage images and achieves up to 95% detection accuracy using an ensemble of object detection and segmentation models. The result is a structured damage report generated in approximately 90 seconds from the submitted media.
This guide covers how AI vehicle damage detection works, the deep learning models behind it, how vehicle damage tagging and labelling improves accuracy, the challenges the system faces and how they are addressed, and real-world use cases across insurance, fleet, and rental operations.
(Also read: The evolution of vehicle inspections - exploring the past, present, and future)
What is AI Car Damage Detection?
AI car damage detection is a computer vision technology that identifies vehicle damage from photos or video. It classifies each finding by type, location, and severity, then returns a structured report in seconds.
Insurers, fleet operators, and rental companies use it to replace slow manual inspections and standardise damage assessment at scale.
Types of Car Damage AI can detect
AI car damage detection focuses on physical damage visible in photos and video. The damage falls into three main categories.
Metal Damage

Metal damage covers the car body panels: bumper, hood, doors, boot, and side panels. Dents result from direct impact compressing the metal inward. Scratches occur when a hard surface removes paint. Tears happen when the impact is severe enough to split the metal.
Glass Damage

Glass damage on windshields and windows carries a safety implication beyond repair cost. Even a small crack reduces the glass's ability to absorb and distribute impact force. AI detection classifies each glass damage type separately so the severity and urgency of repair is clear in the output.
Miscellaneous Damage
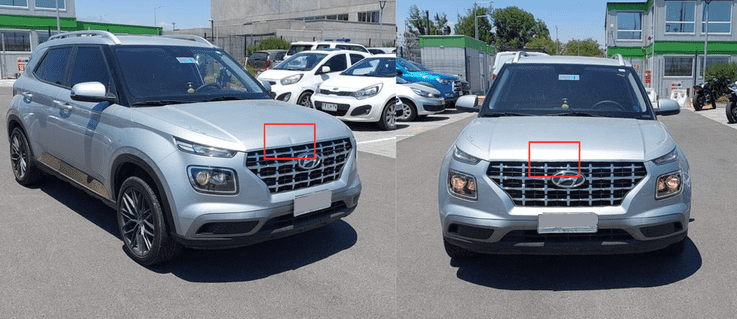
Miscellaneous damage includes panel misalignment, gaps between components, and dislocation. These are often signs of a prior collision that was not fully repaired. They matter for pre-purchase inspections and insurance pre-policy checks where prior damage history affects the risk profile.

TL;DR
- AI car damage detection uses computer vision to spot dents, scratches, and structural damage from photos or video.
- It runs an ensemble of object detection and segmentation models, trained with self-supervised and semi-supervised learning.
- Vehicle damage tagging quality directly drives detection accuracy.
- Known challenges include reflections, shadows, perspective, damage overlap, and micro-damages, each handled at capture and model level.
- Insurers, fleet operators, and rental companies use it to cut manual inspections, speed up claims, and standardise assessment.
How AI Car Damage Detection Works: End-to-End
The detection process follows five steps from capture to integration.
- Photo or video capture: The vehicle is photographed or filmed using a smartphone app or fixed camera system. A guided capture flow ensures all required angles are covered. Inspektlabs' quality gate checks each submission within 15 seconds, rejecting blurred or poorly lit media and prompting resubmission before the AI model runs.
- Model inference: The submitted media is processed by an ensemble of deep learning models. Object detection models scan for damage locations. Segmentation models identify the exact pixel-level extent of each finding. Both run simultaneously on the uploaded images.
- Damage classification: Each detected finding is labelled by category (metal, glass, miscellaneous), sub-type (dent, scratch, crack), location on the vehicle (hood, front door, windshield), and severity. This structured classification is what makes the output actionable rather than just a list of flags.
- Vehicle condition report generation: A complete vehicle damage detection report is generated in approximately 90 seconds. It documents every finding with category, location, severity, and estimated repair cost. The report is timestamped and tamper-proof on creation.
- Integration with downstream systems: The report connects to claims management platforms, fleet management tools, rental systems, and repair network software via the Inspektlabs AI car damage detection API. No manual data re-entry is required.
AI Models Used for Car Damage Detection
Several deep learning architectures are used in vehicle damage detection. Choosing the right model depends on the task.
Object Detection Models
Object detection is the primary task in AI car damage detection. These models take an image as input and output bounding boxes around each identified damage area, along with a classification label.
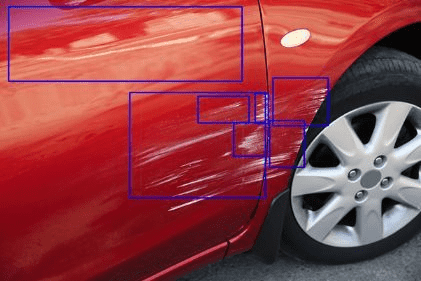
The most widely used deep learning car damage detection models in this category are:
- YOLO (You Only Look Once): Processes the entire image in a single pass, making it fast and efficient for real-time detection. Suited to high-volume inspection workflows where speed matters.
- EfficientDet: Balances accuracy and computational efficiency. Performs well across different image resolutions and damage scales.
- Faster R-CNN: A two-stage detector that generates region proposals first and then classifies them. Higher accuracy on complex scenes but slower than YOLO.
Segmentation Models

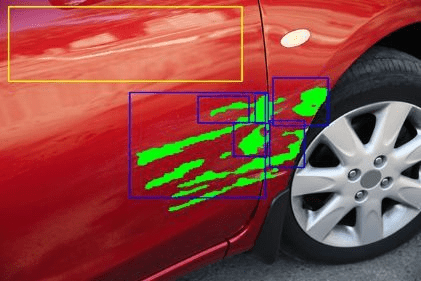
Segmentation models go further than bounding boxes. They assign a label to each pixel in the image, identifying the exact shape and area of the damage. This matters for repair cost estimation, where dent depth and surface area directly affect the quote.
Inspektlabs uses Vision Transformers for this task. These models use self-attention mechanisms to capture long-range relationships across the image, making them particularly effective for irregular damage shapes such as spider cracks and multi-panel dents.
Ensemble Learning: Combining Both Models
Neither model is sufficient on its own. Object detection models produce false positives on reflective surfaces. Segmentation models can struggle with unclear boundaries on complex damage.
The solution is ensemble learning: running both models and accepting only the predictions where the object detection bounding box overlaps with the segmentation output. Boxes with overlap are true positives. Boxes without overlap are rejected as false positives.
The result is significantly higher precision. For scratch detection on reflective surfaces, the ensemble model eliminates false positives that the object detection model alone produces. For glass crack detection, where reflections cause the most noise, the ensemble approach correctly isolates actual crack damage while discarding reflection artefacts.
AI Damage Detection
Detect damage across 163 vehicle parts in seconds
From photos and videos, no physical inspection needed.
Self-Supervised and Semi-Supervised Learning in Car Damage Detection
The ensemble of object detection and segmentation models describes how inference works. What drives continuous improvement is how the models are trained. Inspektlabs uses two advanced training methodologies beyond standard supervised learning.
Self-Supervised Learning (SSL)
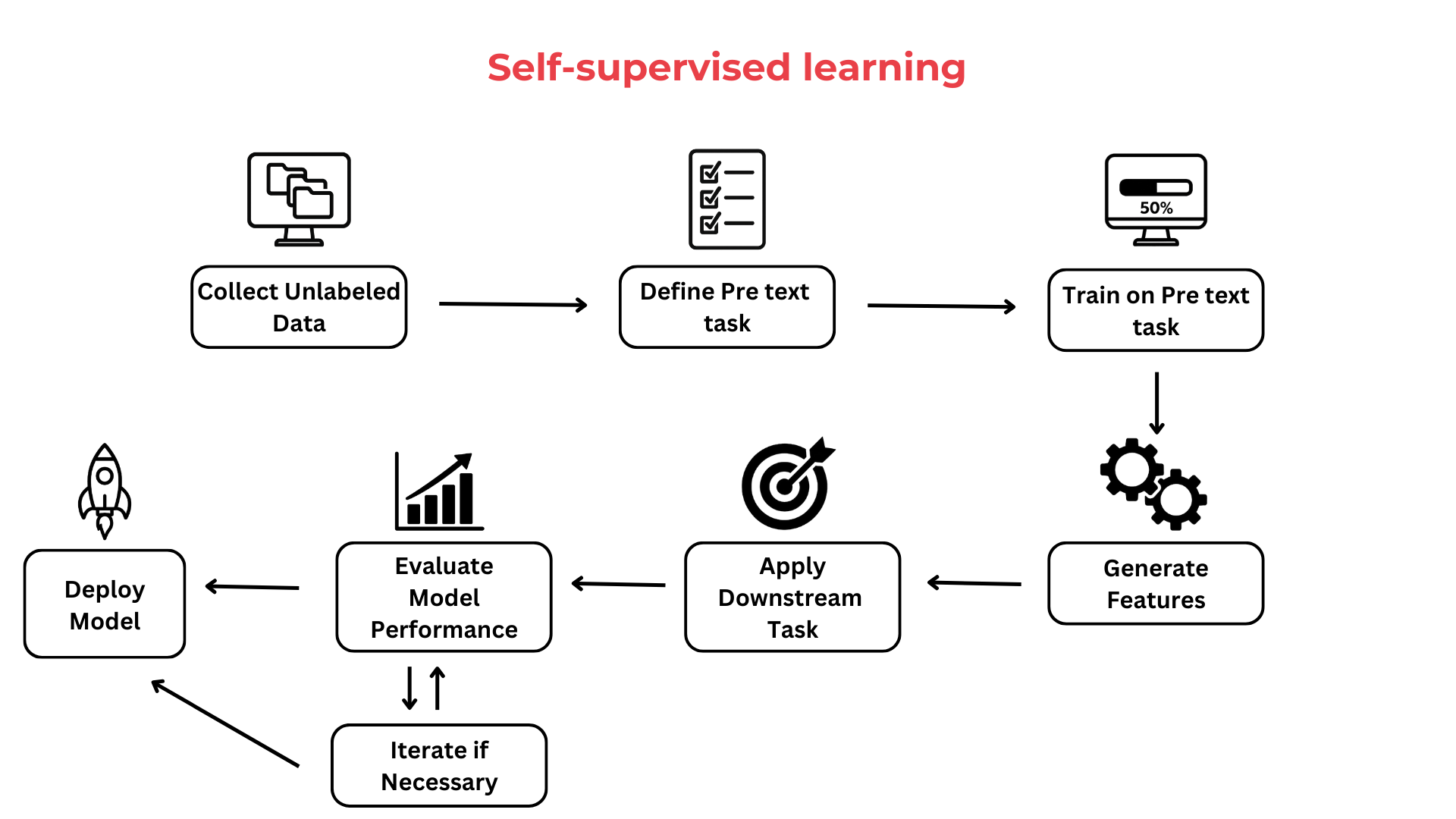
Self-supervised learning allows models to learn from unlabelled data by generating their own training tasks. In natural language processing, this is what powers models like GPT. For computer vision, SSL pretrains models on raw vehicle images before labelled damage examples are introduced.
SSL architectures used in vehicle damage detection include DINO, BYOL, SimCLR, MoCo, and MAE. Each uses a different approach to learn visual representations without requiring manually annotated images.
The benefit is significant: SSL reduces the manual labelling burden and helps models learn general visual features (shape, texture, surface variation) from large volumes of raw vehicle imagery.
However, SSL alone is not sufficient for car damage detection. Damage features are subtle relative to the entire vehicle. SSL models tend to learn how to recognise the vehicle itself rather than the damage on it. Pixel-level understanding of small scratches and chips requires more targeted supervision than SSL provides.
Semi-Supervised Learning: The More Effective Approach
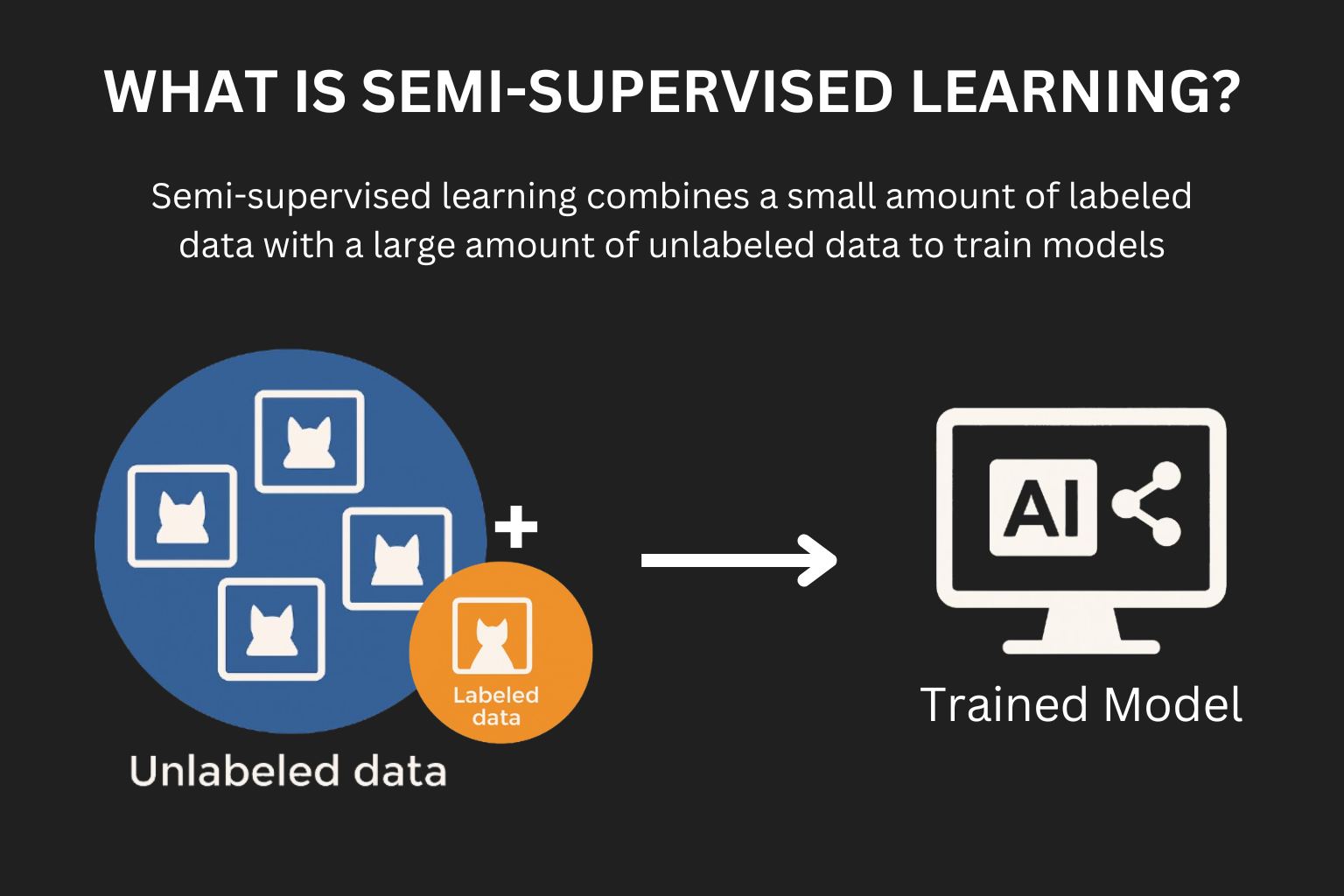
Semi-supervised learning bridges the gap between labelled and unlabelled data. It combines a smaller set of precisely labelled images with a larger set of unlabelled vehicle imagery to train the model efficiently.
Inspektlabs' semi-supervised training follows three steps:
- Bounding box training: Bounding box annotations are faster to produce than pixel-level segmentation labels and exist in large quantities in the database. The model is first trained on bounding box data to learn general damage locations.
- Conversion to rectangular segmentation: Bounding box data is converted into rectangular segmentation areas, giving the model an intermediate level of spatial precision without requiring full pixel-level annotation of every training image.
- Fine-tuning with segmentation labels: The model is then fine-tuned using actual segmentation data, learning the precise shape and extent of damage. This final step produces a model that combines the speed benefits of bounding box training with the accuracy of segmentation.
Semi-supervised learning is more cost-effective than full supervised training. It uses existing bounding box data efficiently, allows faster training cycles, and produces better generalisation across vehicle types and damage conditions.
Common Challenges in AI Car Damage Detection
Every AI model has failure modes. Here are the five most common challenges in vehicle damage detection and how Inspektlabs addresses each.
- Reflective surface of the vehicle
Shiny or metallic surfaces reflect light in ways the model can misinterpret as physical damage. Light bouncing off a curved door panel can resemble a dent or scratch.

How we handle it: Multi-angle imaging captures the same surface from multiple viewpoints, allowing the ensemble model to cross-reference predictions. Reflections produce inconsistent predictions across angles. Actual damage produces consistent ones.
- Perspective variations
Damage visible from one angle may be invisible from another. Conversely, a lighting effect at a specific angle may appear as damage when none exists.
How we handle it: The guided capture flow in the Inspektlabs app requires photos from a set of defined angles. This standardises the perspective input and reduces the chance of angle-dependent false negatives.
- Lighting issues (shadows and low light)
Shadows can hide damage on the surface. Low-light conditions make dents and scratches hard to detect. Both cause false negatives.

How we handle it: Shadow detection and processing techniques are applied to reduce shadow artefacts. If lighting is assessed as insufficient, the submission is flagged and the user is prompted to recapture under better conditions. The quality gate rejects images that fall below the minimum lighting threshold before they reach the detection model.
- Damage overlap
When multiple damage types overlap, such as a scratch covering a dent, the dominant visible damage can prevent the underlying issue from being detected.

How we handle it: Overlap cases are collected as specific training data points. The model is trained on these examples so it learns to look for secondary damage beneath the primary visible feature.
- Micro damages
Micro-damages are small scuffs, hairline scratches, and minor tears that are easy to miss even during manual inspection. Their size makes them challenging to detect in standard resolution imagery.
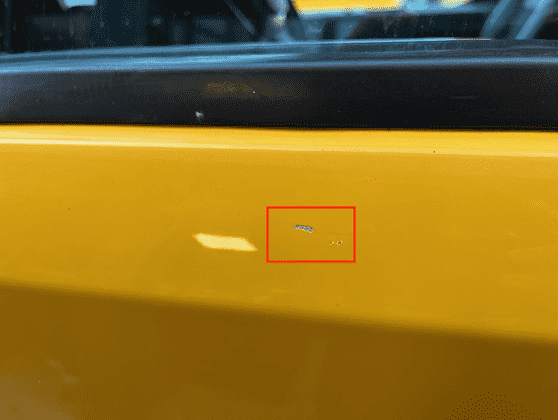

How we handle it: Micro-damages require full vehicle capture at sufficient resolution. Inspektlabs' app guidance covers the full vehicle perimeter, and the quality gate checks resolution before processing. For very small damage in low-data areas, the tracking method (using neighbouring video frames to confirm a detection across multiple frames) is used to filter out single-frame noise and confirm micro-damage findings.
Related: Guidelines for Capturing Micro-Damages Through Photos and Video.
How to overcome these challenges
AI-powered Car Damage Detection isn’t easy, and comes with a ton of challenges.
However, working around these challenges to improve efficiency can be achieved with some basic steps. Some of them include -
- Multi-angle imaging captures vehicle damage from different viewpoints, giving the AI model varied perspectives of the damage. This results in fewer false positives or negatives caused by reflections and perspective variations.
- To avoid shadows and low-light issues, shadow detection and processing techniques are applied to remove shadows from the images. If there is excessive darkness or shadows, the model is trained to flag the images and exclude them from the damage detection process to avoid false positives or negatives.
- Damage overlap is a rare scenario and is less frequent. To avoid this, specific visuals are collected for such cases, which are later used as data points to train the AI model to identify these cases where they occur.
- Micro damages can be captured by ensuring you capture the entirety of the car for better quality analysis. Additionally, focusing on using a good camera, picking the right location, lighting, and background, and framing them the right way is the way to go.
(Also read: Guidelines for capturing micro damages through photos/videos of a damaged vehicle)
Vehicle Damage Tagging and Labelling
The quality of vehicle damage tagging directly determines how well the AI model learns. Labelling, or annotation, is the process of assigning specific tags to images and video so the model understands what each visual pattern represents.
For scratches, precise labelling uses multiple smaller bounding boxes that follow the damage's shape, rather than a single large box that captures surrounding undamaged area.
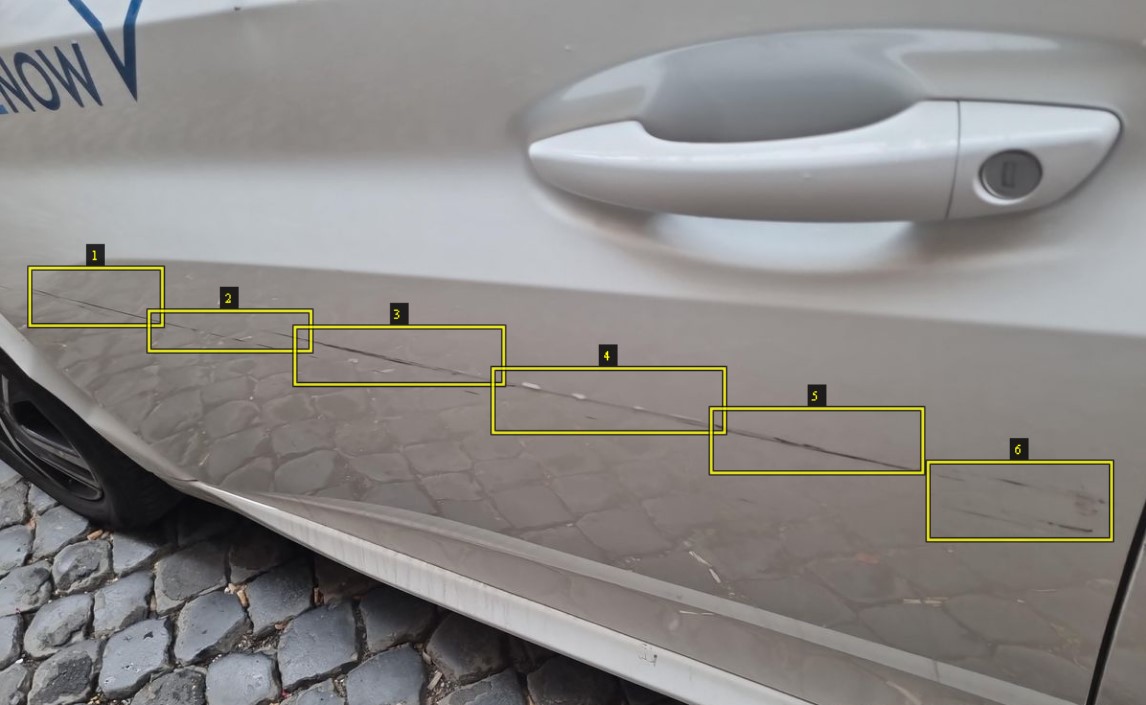
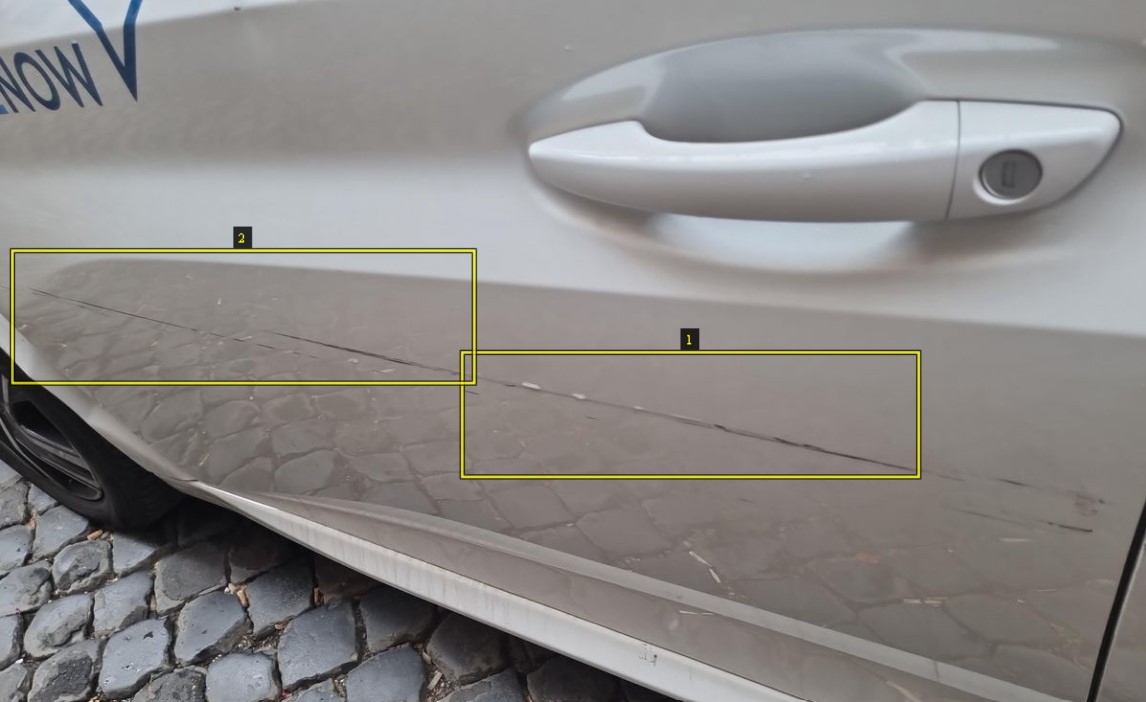
This distinction matters because a coarse bounding box teaches the model that a larger area is damaged, leading to inflated severity assessments.
Data selection is equally important. Analysing model performance on the training set identifies where false positives and false negatives are concentrated. Those specific cases become the focus of additional labelling effort. Improving the weakest areas of the training data produces faster accuracy gains than simply adding more data uniformly.
AI vs Manual Inspection: A Practical Comparison
For a full seven-parameter comparison, see Human vs AI Inspections: A Comparison Across 7 Parameters.
Use Cases: Insurance, Fleet, and Car Rental
Insurance
AI vehicle damage detection replaces the field adjuster visit for pre-policy inspections and FNOL damage assessment. The policyholder submits photos through the guided Inspektlabs app. The AI runs the damage assessment and generates a report. The insurer receives a structured, timestamped output without deploying anyone.
For claims, the AI report serves as the primary evidence layer. The comparison between the pre-policy baseline and the post-incident submission identifies new damage. Fraud flags are built into the assessment, highlighting patterns inconsistent with the stated incident.
Related: AI in Motor Insurance Claims Workflow.
Fleet Management
Fleet operators use AI car damage detection at every shift handover. A driver captures the vehicle at the start and end of each shift. The AI compares both reports and flags any new damage, attributing it to the relevant shift period. This creates a continuous, auditable damage record across the entire fleet.
Maintenance issues detected early through regular AI inspection prevent small faults from escalating into expensive repairs or unplanned downtime.
Related: AI Vehicle Inspection for Fleet Management.
Car Rental
Rental operators document vehicle condition at check-in and check-out using the Inspektlabs car rental damage detection platform. The before and after reports create a clear, timestamped record for every rental period. Return disputes are resolved quickly because both parties have access to the same verified evidence. High-volume airport locations use fixed scanner systems. Remote or lower-volume locations use the smartphone app.
The Inspektlabs AI Car Damage Detection API
Inspektlabs operates as an API-first platform. Businesses integrate car damage detection into their existing systems rather than replacing them.
The API accepts photo and video submissions, runs the damage assessment, and returns a structured JSON report. This report can feed directly into claims management systems, fleet management platforms, rental management tools, or repair estimation software. No manual processing is required at any step.
For developers and integrators evaluating the technical integration, the Inspektlabs team provides full API documentation and sandbox access.
Inspektlabs' AI car damage detection is trained on over 10 million vehicle images and achieves up to 95% accuracy using an ensemble of deep learning models.
If you manage vehicle inspections at scale and want to see the system in action:
Frequently Asked Questions
- How does AI car damage detection work?
The vehicle is photographed or filmed using a guided smartphone app or fixed camera. An ensemble of object detection and segmentation models analyses the media. Damage is classified by type, location, and severity. A structured condition report is generated in approximately 90 seconds. The report integrates with downstream workflows via API. - What types of car damage can AI detect?
AI car damage detection covers metal damage (dents, scratches, tears), glass damage (cracks, chips, spider cracks, large-range breakage), and miscellaneous damage (panel dislocation, gaps between components). Each finding is classified by sub-type and severity in the output report. - What AI models are used for vehicle damage detection?
Object detection models including YOLO, EfficientDet, and Faster R-CNN identify damage locations in images. Vision Transformer segmentation models identify the exact pixel-level extent of each finding. Inspektlabs uses an ensemble of both, combined with semi-supervised learning techniques for continuous model improvement. - How accurate is AI car damage detection?
Inspektlabs achieves up to 95% detection accuracy using an ensemble of object detection and segmentation models trained on over 10 million labelled vehicle damage images. The ensemble approach removes false positives by accepting only predictions where both model types agree on the finding. - What industries use AI car damage detection?
Motor insurers use it for pre-policy inspection, FNOL assessment, and fraud detection. Fleet operators use it for shift handover condition checks and incremental damage tracking. Car rental companies use it to document vehicle condition at check-in and check-out. Used car platforms and dealerships use it for standardised condition reporting. - Can AI detect micro-damages that humans miss?
Yes, with the right capture conditions. Micro-damages require full vehicle capture at sufficient resolution and adequate lighting. Inspektlabs' quality gate checks these conditions before processing. For very small damage, the video tracking method confirms findings across multiple frames, filtering out single-frame noise that would otherwise produce false positives.



